Skip to main content
Cornell Graphics and Vision Group
Cornell University
Cornell Bowers CIS - College of Computing and Information Science
Home
Papers
People
Events
Main Menu
Enter the terms you wish to search for
Search Cornell.edu
Cornell Graphics and Vision Group
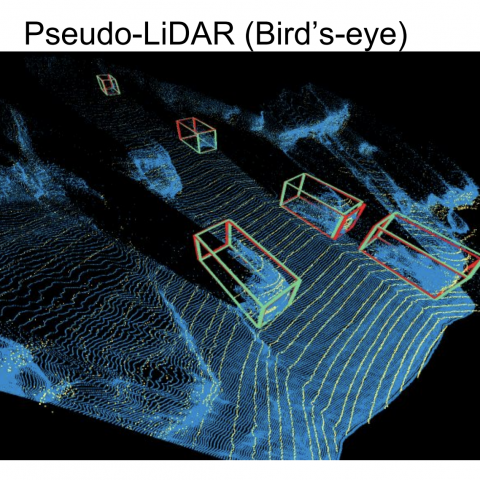
Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving
Home
<
Papers
<
Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving
CVPR 2019