Author: Yan Wang
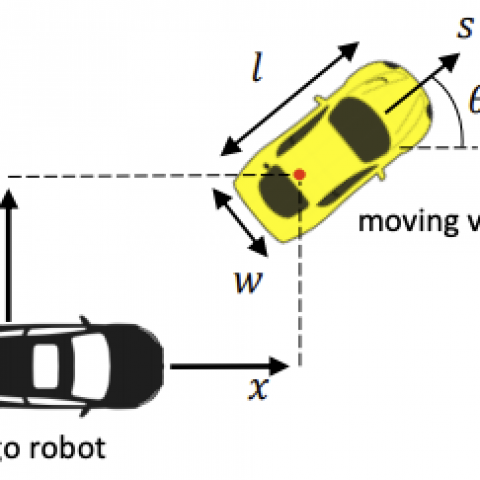
Vision-only 3D Tracking for Self-Driving Cars
LDLS: 3D Object Segmentation through Label Diffusion from 2D Images
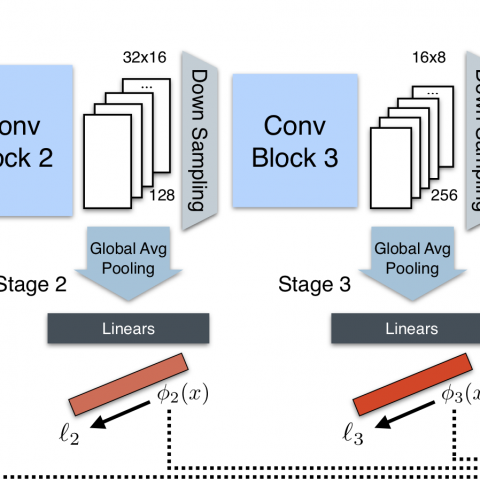
Resource Aware Person Re-identification across Multiple Resolutions
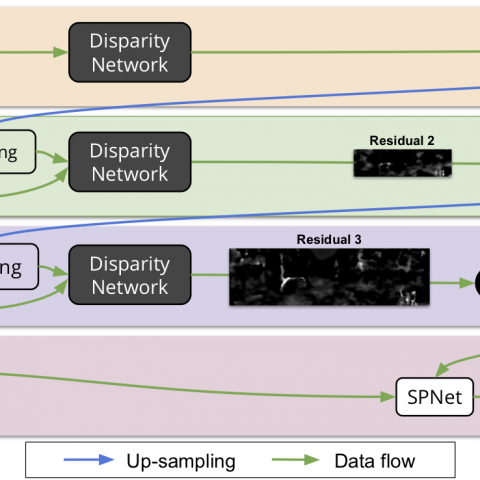
Anytime Stereo Image Depth Estimation on Mobile Devices
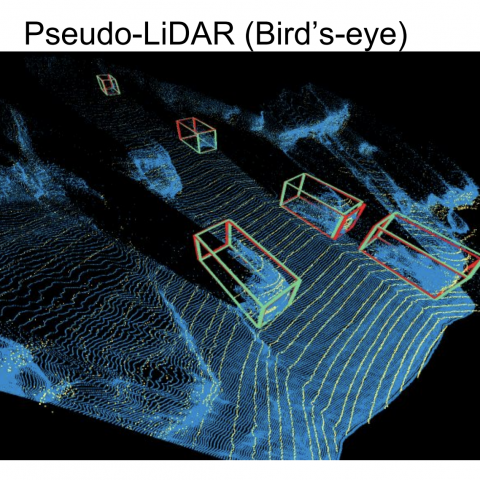
Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving