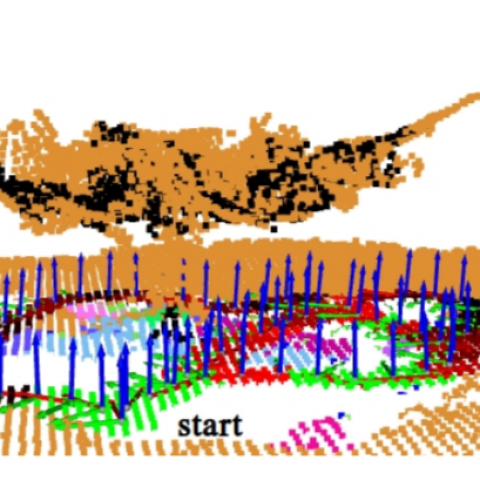
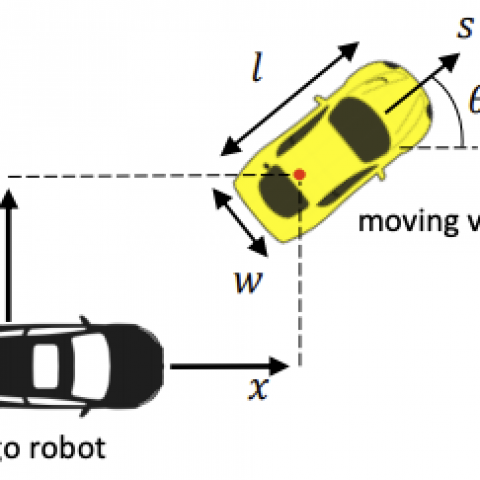
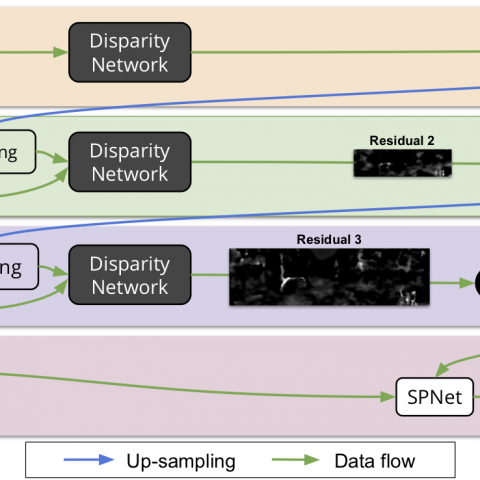
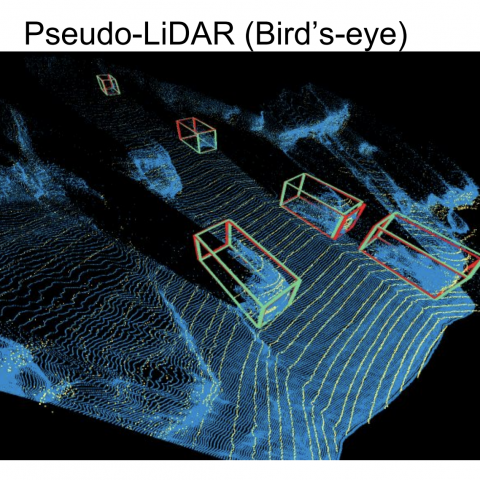
DeepSemanticHPPC: Hypothesis-based Planning over Uncertain Semantic Point Clouds ICRA 2020; First three authors contributed equally (random order). PDF | Website Authors: Yutao Han, Hubert Lin, Jacopo Banfi, Kavita Bala and Mark Campbell Vision-only 3D Tracking for Self-Driving Cars CASE 2019 Authors: Carlos Diaz-Ruiz, Yan Wang, Wei-Lun Chao, Kilian Q. Weinberger and Mark Campbell LDLS: 3D Object Segmentation through Label Diffusion from 2D Images RA-L, IROS 2019 PDF Authors: Brian H. Wang, Wei-Lun Chao, Yan Wang, Bharath Hariharan, Kilian Q. Weinberger and Mark Campbell Anytime Stereo Image Depth Estimation on Mobile Devices ICRA 2019 PDF | Website | Video Authors: Yan Wang, Zihang Lai, Gao Huang, Brian H. Wang, Laurens van der Maaten, Mark Campbell and Kilian Q. Weinberger Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving CVPR 2019 PDF | Website | Video Authors: Yan Wang, Wei-Lun Chao, Divyansh Garg, Bharath Hariharan, Mark Campbell and Kilian Q. Weinberger